
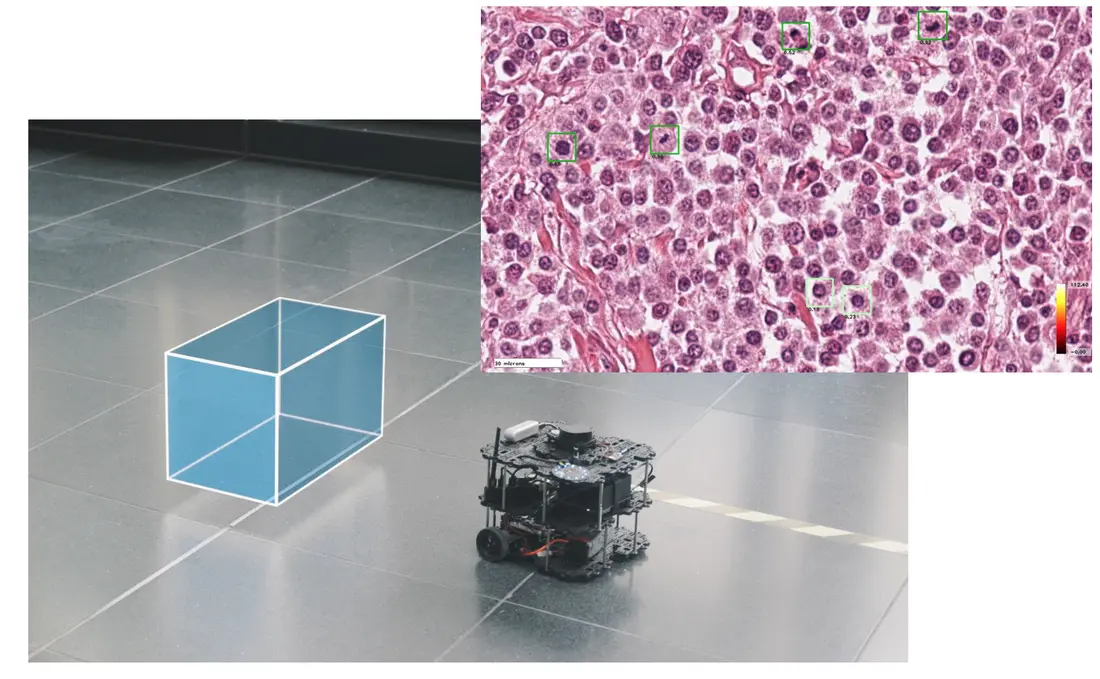
The Computer Vision research area focuses on advanced AI methods in the field of image processing. Particular attention is paid to boundary conditions that must be taken into account when using cameras in mobility vehicles, such as adverse environmental conditions or high dynamics. The aim is to research AI architectures that can reliably guarantee a high detection quality from camera data even under such boundary conditions. AI-based methods are used to generate a comprehensive image of the vehicle environment from different sensors in real time as a basis for automated driving and unmanned flying. Robust sensor data fusion, which considers sensor data from different sources (e.g. from the vehicle or from the infrastructure) and of different quality, is at the heart of the research. The focus is also on real-time capability and the development of AI systems for mobility applications that are not very computationally intensive. Many system components that are needed for automated mobility require real-time capability, e.g. detection and tracking of objects or control systems. In order to harness the benefits of AI methods for such system components, it is necessary to process AI algorithms in real time. Innovative architectures of AI algorithms and their efficient implementation on hardware components play a central role here.
Another important application and focus of this subject area is the use of computer vision on medical image data. In cooperation with national and international clinical research institutions and industry partners, the latest AI methods are being researched and their application tested.


![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)