SAVE-ROAD
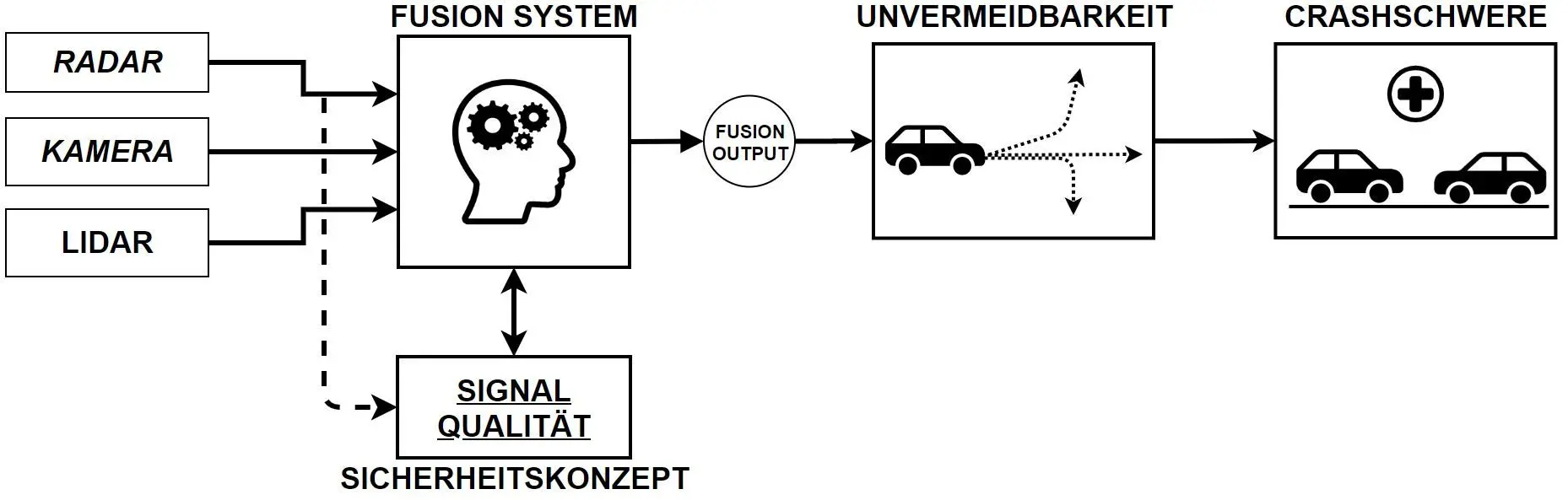
Der zunehmende Einsatz von automatisierten Fahrfunktionen in urbanen Gebieten erfordert eine lückenlose Überwachung der Fahrzeugumgebung durch den Einsatz verschiedener Fahrzeugsensoren. Nicht nur die Erkennung von plötzlich auftauchenden Objekten, wie einem Kind, das einem Ball hinterherläuft, sondern auch die hohe Dynamik von Verkehrs- und Wetterszenarien, wie z. B. Regen und dadurch entstehende Reflexionen, können große Herausforderungen für Erkennungsalgorithmen darstellen. Ziel von SAVE-ROAD ist daher die Entwicklung eines Systems zur Umfelderkennung zur zuverlässigen Vorhersage der möglichen Unfallschwere. Zu diesem Zweck werden KI-Fusionsmethoden wie neuronale Netze, die auf Sensorrohdaten von Radar, Kamera und LiDAR basieren, untersucht und verglichen. Die Robustheit dieser Methoden wird unter wechselnden Wetterbedingungen wie Regen und Nebel in der CARISSMA eigenen Versuchshalle getestet und bewertet. Diese Analyse wird für die Entwicklung eines Sicherheitskonzepts verwendet, dessen Aufgabe es ist, die Qualität der gelieferten Signale zu kontrollieren. Das KI-Fusionsmodul übergibt dann Informationen über detektierte Objekte an ein Unvermeidbarkeitsmodell, welches mögliche Kollisionspartner sowie dazugehörige Parameter wie die Auftreffgeschwindigkeit zwischen den Fahrzeugen prädiziert. Abschließend werden diese Daten genutzt, um sowohl anhand einer physikalischen Modellierung als auch mit KI-Auswertungen von Datenbanken die Schwere eines Unfalls abzuschätzen. Als Projektabschluss wird ein Demonstrator aufgebaut, mit dem eine Verifizierung dieser Algorithmen unter realen Bedingungen einschließlich Regen und Nebel umsetzbar ist.
Projektpartner: PCO AG, EFS - Elektronische Fahrwerksysteme GmbH
Fördergeber: Bayerische Forschungsstiftung
Förderkennzeichen: AZ-1355-18
Ansprechpartner

Prof. Dr.-Ing. Thomas Brandmeier
Tel.: +49 841 9348-3840
Raum: H023
E-Mail: Thomas.Brandmeier@thi.de

Daniel Vriesman, M.Eng.
Tel.: +49 841 9348-3395
Raum: H120
E-Mail: Daniel.Vriesman@carissma.eu
Projektpartner