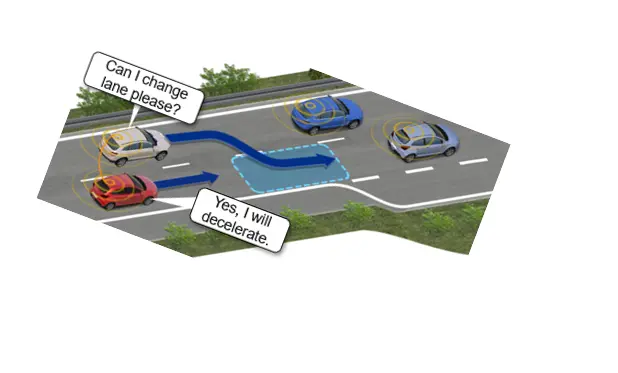
The further development of wireless communication systems in recent years has made technologies available that can sustainably improve vehicle safety and traffic efficiency through their use. While the KOALA project in the first phase of the DFG's Priority Programme 1835 mainly aimed at reducing the latency generated by the communication system as well as at latency modelling, the follow-up project KOALA2 addresses the use of this low-latency communication for vehicle automation in a holistic approach. Design patterns for communication are being developed for scenario-based manoeuvre coordination between vehicles in cooperative use cases (such as lane changing, driving in a pack/platooning and emergency steering). For this purpose, the current broadcast-based information dissemination will be extended to include communication in groups of vehicles that exclusively comprise the actors of the respective manoeuvre. The developed procedures will be implemented prototypically and validated experimentally. The project sustainably improves cooperative manoeuvre and trajectory planning as key technologies for safety-relevant use cases in cooperative automated driving.


![[Translate to English:] Tests zum Autonomen Fahren im Cockpit der Hexapode](/fileadmin/_processed_/1/6/csm_220421_HCGI_Seite_Riener_534971f95c.webp)

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)