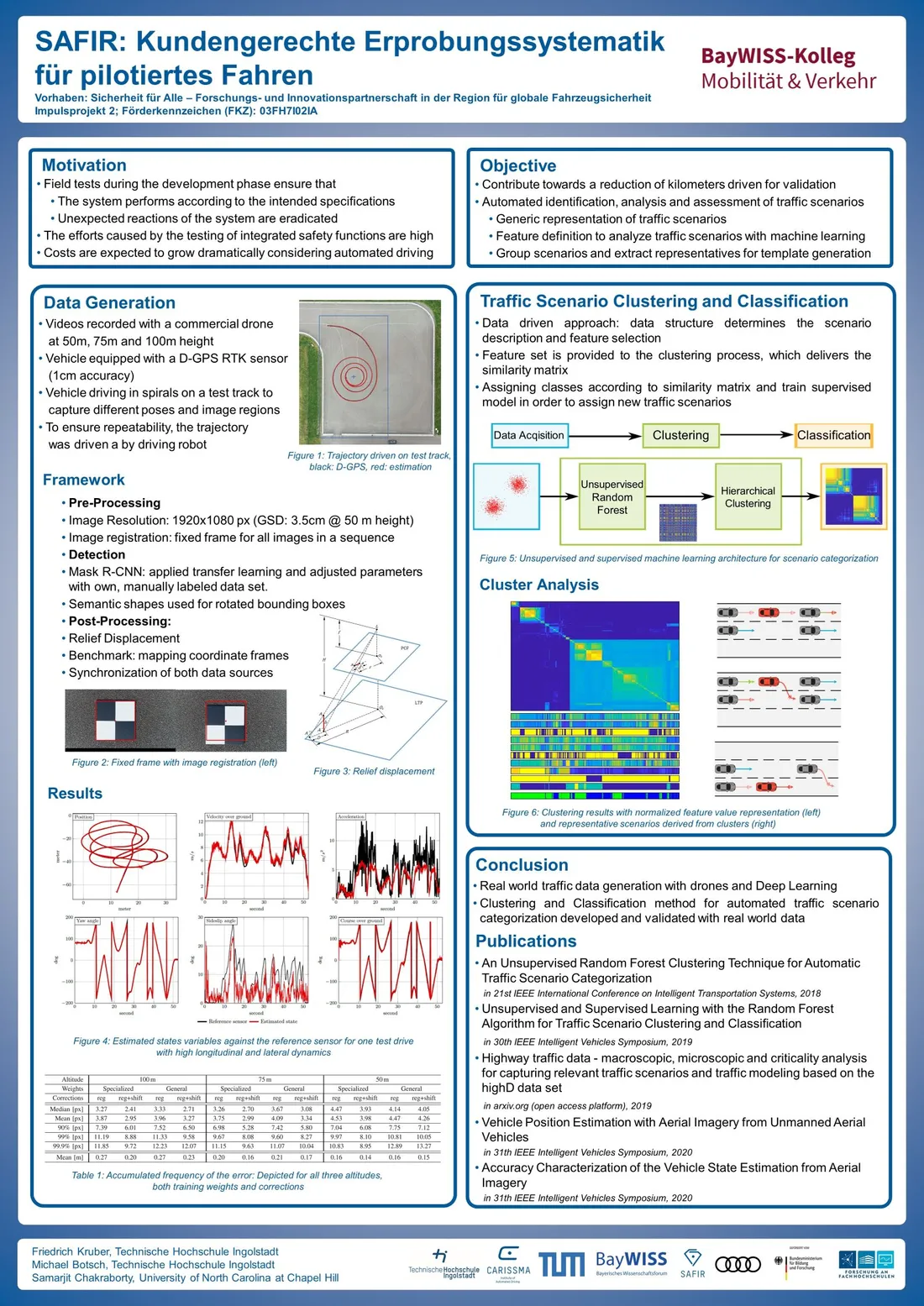
Safety for all – Innovative Research Partnership on Global Vehicle and Road Safety Systems
User-oriented test systematics for piloted driving (KEPF)
By performing field operational tests during the test phase, car manufacturers try to answer the questions “Does the system perform the intended benefit?” and “Do unexpected reactions of the system occur in the real world operation?” Currently, the efforts caused by the testing of integrated safety functions are high and it is expected to grow dramatically in the near future considering the development towards autonomous driving. In particular, field operational tests of vehicle functions which intervene in longitudinal or lateral dynamics generate high costs. In order to address the issue, this project investigates a concept for a systematic approach of testing autonomous vehicle interventions. The goal is to contribute towards a reduction of kilometers driven on the road for testing.
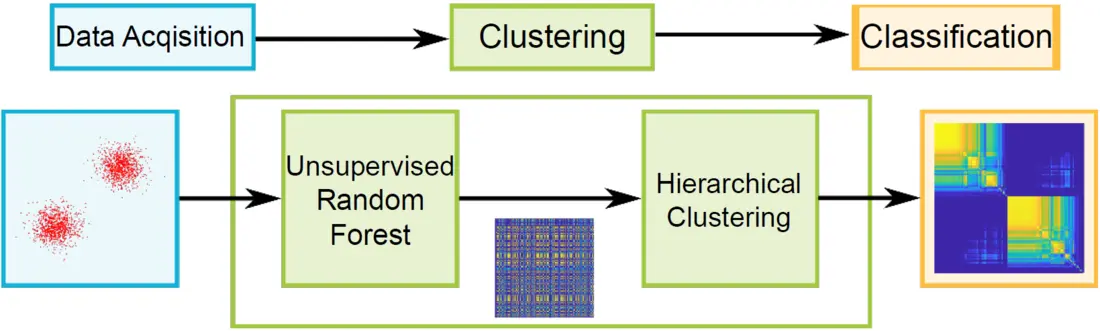
Figure 1: Unsupervised and supervised machine learning architecture for scenario categorization.
The objective is to perform an automated identification, analysis, and assessment of traffic scenarios. For this, machine learning methods are used to analyze traffic scenarios with predefined features. By using cluster algorithms, they are grouped into representative scenarios based on a combination of event-based features since time dependencies play a crucial role. On the basis of proximity measures, the scenarios are then clustered.
Knowing the quantified contribution of a particular scenario to the overall test coverage is of great importance. For this purpose, simulations are carried out and the results are compared with real data from field operational tests. In this way, relevant situations with a high contribution to the test coverage are used to perform a focused and goal-oriented test phase. Demonstrational test scenarios are derived, which can then be tested reproducibly on the CARISSMA test sites.

Figure 2: Traffic situation at a roundabout. Each vehicle has a unique ID (red number). The vehicles can be recorded and tracked on the basis of machine learning procedures. From this, parameters such as position and speed are determined (turquoise).
In addition to simulations, real data from field operational tests and regular road traffic are used. Therefore, a methodology for recording traffic events is being developed in this project. With the help of unmanned aerial vehicles, a solution is being worked on that enables the recording of entire road sections with many road users. Figure 2 shows the implementation at a roundabout scenery.
This type of data acquisition offers various advantages: synchronous data acquisition of several objects, low financial requirements for the hardware and the mobility of the system. In addition, signalling systems, such as traffic lights, can also be integrated into the evaluation, in order to draw further conclusions from the behavior of the participants.
A mature data processing is essential for the output quality. The object recognition is carried out by means of a machine learning process. The procedure utilizes the interaction of several neural networks. It enables not only the detection of objects but also the determination of their size, position and orientation. In the last step, objects are tracked in order to represent trajectories and finally traffic scenarios. The quality of the state estimation is assessed by means of vehicle reference sensors on the CARISSMA Outdoor test facility.

![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)