
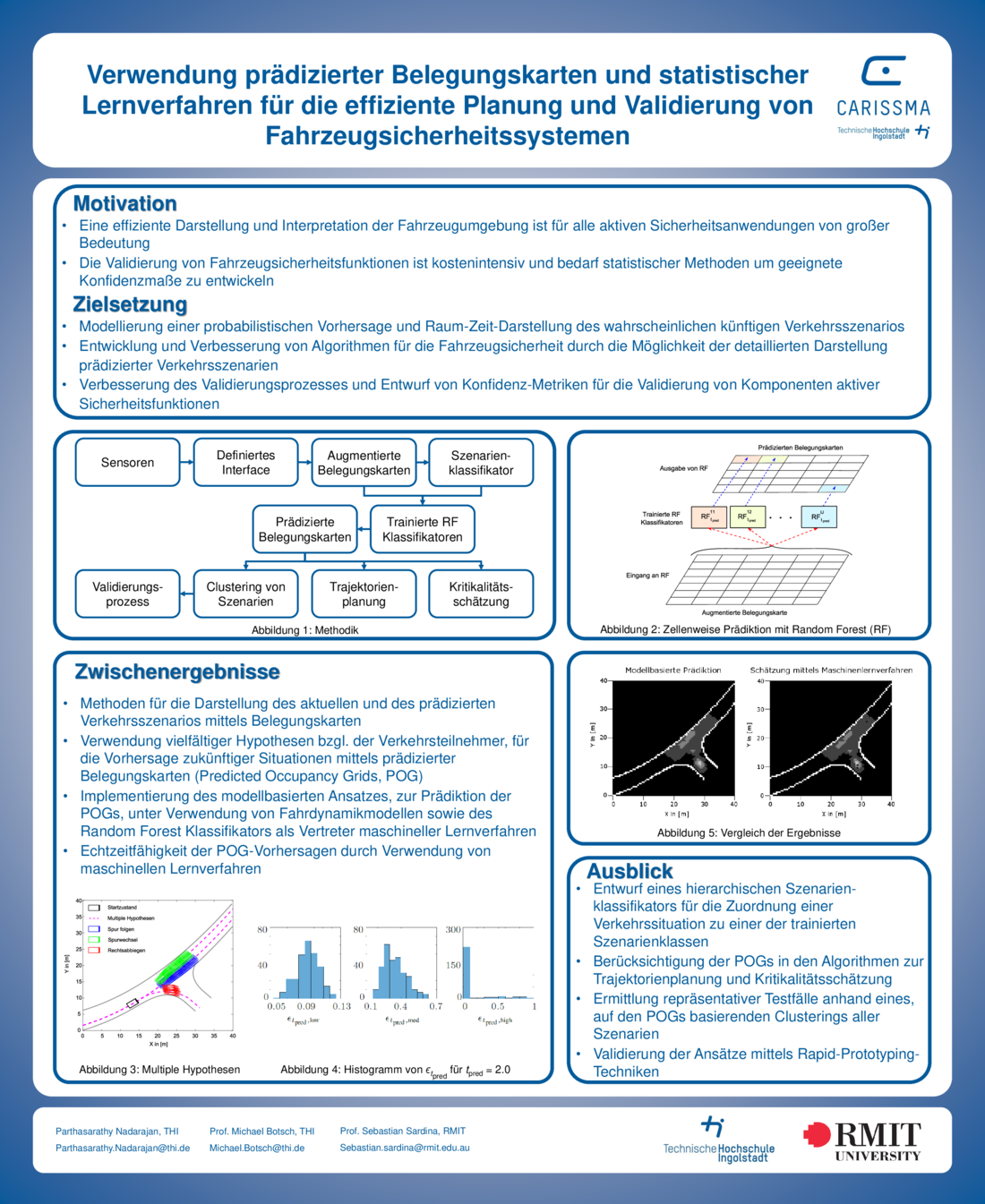
This research aims to develop a suitable representation and interpretation of the environment by modeling and representing the uncertainties about the likely future behavior of the traffic participants. Such a probabilistic space-time representation of the future traffic scenario is termed as the Predicted Occupancy Grid (POG). The estimation of this representation based on the data from the sensors should be in real-time for its application in vehicle safety. Due to the huge computational efforts that come along with analytical methods for the estimation of POGs, a machine learning approach is adopted in this research. A suitable representation of the current state of a traffic scenario can be generated using the information from exteroceptive sensors and is termed as the Augmented Occupancy Grid (AOG). Machine learning algorithms such as Autoencoders and Random Forests are used for the mapping of the Augmented Occupancy Grids to the Predicted Occupancy Grids.
By modeling the future traffic scenarios in detail using machine learning techniques, critical components in active safety systems like criticality estimation and trajectory planning are improved. The POGs are also used for constructing representative test scenarios which in turn are helpful in improving the validation process of active safety systems. Hereby similarity measures that are based on the POGs play a crucial role. The initial validation of the methodology is carried out with the help of simulations followed by experiments with real vehicles at the test facilities of CARISSMA.
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)