Project description
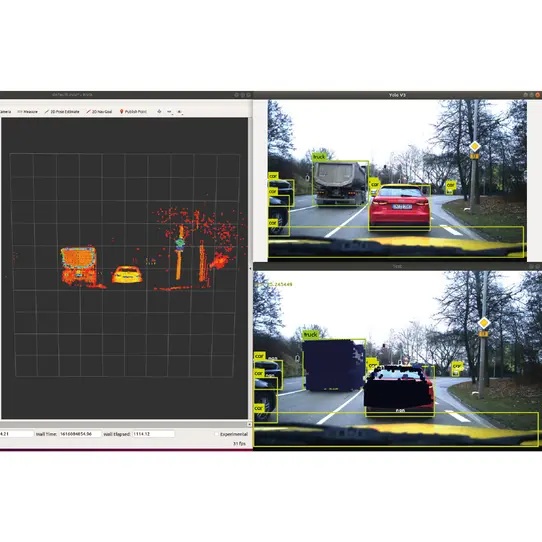
- Increasing the environment awareness of an autonomous vehicle by incorporating new high-resolution 3D flash lidar sensors into data fusion with radar and camera sensors.
- Evaluating the benefits of centralized raw data-based versus decentralized object list-based data fusion.
- The perception and decision algorithms are developed for a use case (avoiding an obstacle in the presence of other road users). The use case is validated virtually and experimentally.
Project information
| Tasks THI | AI-based sensor data fusion in the vehicle, virtual sensor models |
| Project partner | Conti Temic, Future Mobility Solutions, Perpetuum Progress GmbH, THI |
| Project sponsor | Forschungsprogramm "Informations- und Kommunikationstechnologie", Bayerisches Staatsministerium für Wirtschaft |
| Project term | 03/15/2020 until 03/14/2023 |
Contact

Group Leader Optical Sensors
Marcel Kettelgerdes, M. Sc.
Phone: +49 841 9348-6451
Room: S421
E-Mail: extern.Marcel.Kettelgerdes@thi.de
Marcel Kettelgerdes, M. Sc.
Phone: +49 841 9348-6451
Room: S421
E-Mail: extern.Marcel.Kettelgerdes@thi.de
Open positions
If you are interested in vacancies for student work within the research group, please send an email with CV to assistenz-iimo-elger@thi.de.
![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)